
Introduction
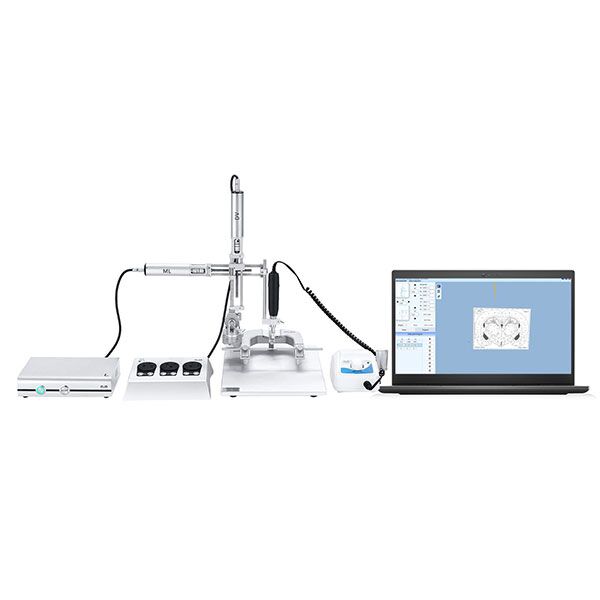
I was running a late-night run of brain-mapping sessions when the rig stalled — total buzzkill. In labs everywhere, folks push high-throughput protocols and expect repeatable results; yet the moment you toss in an automated stereotaxic Instrument the setup often shows you its weak spots (timing, heat, vibe — you name it). Data? Sure: throughput dips 15–40% in many setups when positioning jitter or slow feedback sneaks in. So what gives — and how do we stop losing time and samples?
Why Old Fixes Don’t Cut It
digital stereotaxic instrument is supposed to make routine targeting easier, but I see teams reusing band-aid fixes that fail under real workloads. The standard response is to tweak motion profiles or add thicker mounts. That helps a bit, but it doesn’t address core issues like micropositioners drifting, or servo motors overheating. Look, it’s simpler than you think: you need feedback fidelity and stable power paths — not just tighter screws.
What’s failing?
Let me be blunt: heritage rigs assume perfect conditions. They treat stereotaxic coordinates as static and ignore thermal expansion, electrical noise, and control loop latency. Edge computing nodes shoved into data flows can help with real-time processing, but only when sensor sampling and control loops are tuned together. Power converters that squeak under peak demand will nudge your axes, and guess what? That tiny nudge ruins alignment. I’ve watched a supposedly calibrated arm wander by microns because the stepper drivers were underpowered. We can point fingers at firmware, or at mechanical play, but the real issue is the whole system not being designed as a coordinated control stack.
Next Steps: New Tech & Metrics
Moving forward, we should think in system terms. A modern digital stereotaxic instrument pairs deterministic control with better sensor fusion. That means combining high-rate encoders with inertial checks and smarter PID tuning — plus thermal compensation. I’m talking concrete changes: upgrade to closed-loop micropositioners, add local edge compute for millisecond corrections, and segregate power rails so converters don’t fight the motors. These steps cut jitter and save samples. — funny how that works, right?
What to measure?
We should pick metrics that actually reflect lab life. I recommend three things to grade any proposed fix: 1) positional stability over campaign time (microns drift per hour), 2) recovery time after a fault (seconds to re-lock), and 3) reproducibility across operators (variance in target hit). If a new approach improves two of those three by measurable margins, it’s worth adopting. I’ve run side-by-side tests where swapping to a closed-loop servo and adding thermal mapping dropped miss-rate by half. That felt good — and it saved weeks of re-runs.
To wrap up, I don’t buy one-size-fits-all claims. We need targeted fixes: better sensors, smarter control, and cleaner power. Test with the three metrics above, and you’ll see which upgrades matter. If you want tools and kits that match this playbook, give BPLabLine a look — I’ve used their modules in my own bench and they make integration less painful.